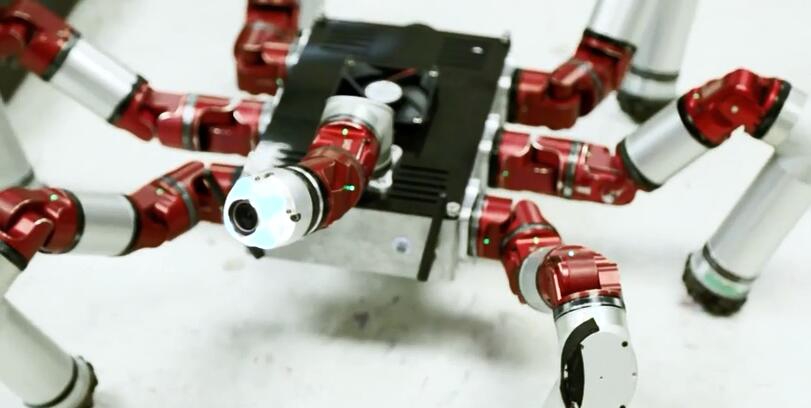
蛇形机器人一直是卡内基梅隆大学(CMU)机器人实验室最引人注目的项目之一,这些机器人依据仿生学原理设计,体型瘦而长,头部装有相机,适合在狭小空间作业,如进入人类无法到达的区域进行搜索和救援。 “多脚蛇”内置压力传感器,即使“长”了六条腿,它同样可以抱紧物体向上滚动。它完全仿照动物与环境的交互方式,根据状态变化不断调整自己以适应环境。
蛇形机器人一直是卡内基梅隆大学(CMU)机器人实验室最引人注目的项目之一,这些机器人依据仿生学原理设计,体型瘦而长,头部装有相机,适合在狭小空间作业,如进入人类无法到达的区域进行搜索和救援。 “多脚蛇”内置压力传感器,即使“长”了六条腿,它同样可以抱紧物体向上滚动。它完全仿照动物与环境的交互方式,根据状态变化不断调整自己以适应环境。


